
Robotics and AI for humans – empowerment through innovation
The 2024 Southern California Robotics Symposium (SCR) will take place at the University of California, Riverside. This premier symposium gathers roboticists from academia and industry throughout Southern California for a series of interactive workshops, social activities, presentations, networking opportunities, and laboratory tours. This year's theme, 'Robotics and AI for humans: empowerment through innovation,' underscores the role of cutting-edge technologies in empowering human capabilities, fostering inclusivity, and forging new pathways for societal advancement. Join us to explore and share how these innovations can create a better future for all of us.
About the Southern California Robotics Symposium
With a high density of academic institutions, research centers, and industry players, the Southern California Robotics Symposium is the premier annual event in Southern California, designed to connect scholars, innovators, and industry leaders at the forefront of robotics and artificial intelligence. Building on the success of previous symposiums—SCR 2016, SCR 2017, SCR 2019, and most recently, SCR 2022 and SCR 2023—this year's event aims to continue the tradition of providing an ideal venue for innovative discussions, state-of-the-art demonstrations, and opportunities for networking and collaboration among the Southern California community.
Program
Thursday 9/19
(Winston Chung Courtyard)
Friday 9/20
Keynote Speakers
UC Los Angeles
Waymo
Podium Sessions
Session 1: Robotic Applications
EELS: An Adaptive and Intelligent Snake Robot for Planetary Exploration
Preliminary Results and Progress on a Food Delivery Robot for the Homeless
Experimental Setup for Investigating Arm Movement Dynamics in Task-Oriented Human-Machine Interaction
Advancing Space Exploration with Autonomous Robotics: On-Orbit Servicing and Lunar Infrastructure Development
Benchmarking Reactive Human-AI Collaboration Powered by Foundation Models
Session 2: Autonomous Systems and Control
Enhancing Online Planning and Human-in-the-Loop Control with Probabilistic Temporal Logic Shields for Partially Observable Systems
Hamilton-Jacobi Reachability Analysis for Hybrid Systems with Controlled and Forced Transitions
A Multi-Oar Driven Unmanned Surface Vehicle
SoNIC: Safe Social Navigation with Adaptive Conformal Inference and Constrained Reinforcement Learning
Embodied AI for Safe and Efficient Manipulation of Deformable Packages
Session 3: AI in Robotics
Neuro-Symbolic Reasoning and Planning for Human-Robot Interactions
Work Faster Not Smarter: Intelligence at the Edge
A Convergent Multi-Agent Reinforcement Learning Algorithm for Dynamic Data Collection in Robotic Sensor Networks
Toward Trustworthy Embodied Intelligence
Session 4: Soft Robotics
Self-Deployable Mechanical Metamaterials for Soft Robots
LCE-integrated soft skin for millimeter-scale steerable soft growing robots
Multistable Bioinspired Origami with Reprogrammable Architectures for Actuation and Adaptive Material
Industry Session
Robot Demonstrations
A Soft Robotic Exosuit For Knee Extension Using Hyper-Bending Actuators
FTC Centerstage Robot
PINKIE: A Robot for Assessing Finger Proprioception
Presentation Guidelines
General information:
- We will have four sessions of talks and one poster session spanning the two days of the symposium.
- The poster session will serve as an excellent opportunity for networking, discussion, and to establish potential collaborations.
- Third item
Oral presentations:
- All talks should be no longer than 15 minutes, with an additional 5 minutes for questions and discussion.
- We suggest highlighting this year's theme in your talk: How does your contribution contribute to human empowerment?
- Keep in mind that SCR attendees include students, faculty, and industry participants.
Poster presentation guidlines:
- We will provide a poster board with dimensions 48" x 36" and an easel.
- Please print your own posters, in either landscape or portrait orientation, but please make sure it is no larger than the board dimensions.
- We suggest highlighting this year's theme on your poster: How does your contribution contribute to human empowerment?
Robot demonstrations guidlines:
- Each group will have an opportunity for a 10 minute presentation with up to 5 minutes for questions, in any format of your choosing. It could include presentation slides or you could demo your robot on stage.
- After all groups have presented, the audience will be encouraged to visit your demo. Each group will be supplied with a table and power supply.
- We will provide a poster board with dimensions 48" x 36" and an easel, if you'd like to include a poster at your exhibit (highly recommended).
Venue and Parking
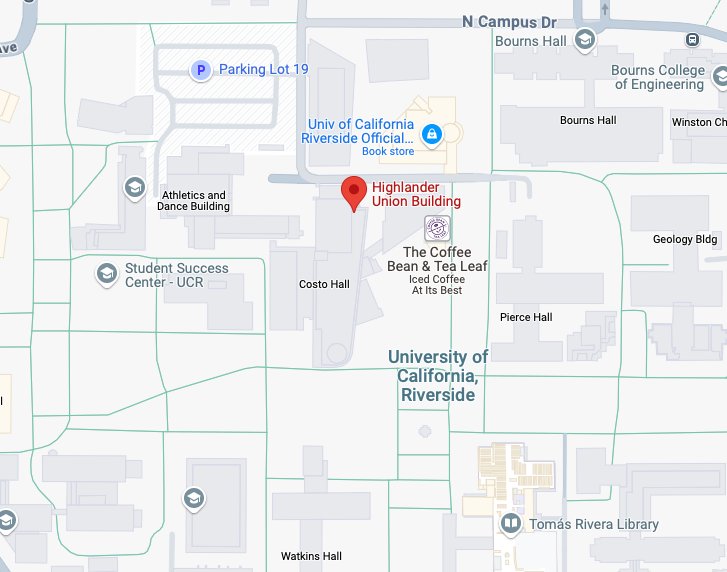
Venue
Highlander Union Building (HUB)
353 Highlander Union Building Riverside, CA 92521
Directions to venue (Google Maps)
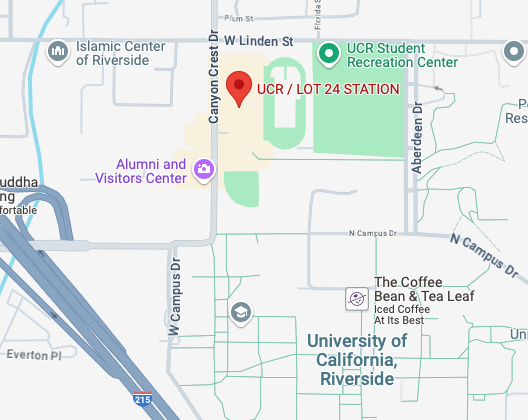
Parking
UCR/Lot 24 Station
Directions to parking (Google Maps)
Parking Permits
We recommend you purchase a parking permit before arriving.
Day parking is $14.
You can prepay for parking here:
Step 1: Click on the link above.
Step 2: Click the green Reserve button for the assigned parking lot.
Step 3: "Continue as Guest" to check out and enter your information.
Step 4: On the day of the event, go directly to Lot 24 Blue to park.
Sponsors
Organizing Committee
Department of Computer Science and Engineering
Department of Computer Science and Engineering
Advisory Committee
Department of Computer Science and Engineering
Contact
For all inquiries, please contact scr2024.contact@gmail.com.